
Intuitive motion capture
Precisely captures human hand motion as raw motion data.
A hand interaction device for humanoid robot teaching and XR training
Air Glove Atlas captures precise human hand motion and connects it to Physical AI and immersive virtual training through haptic feedback and a development-ready pipeline.

One open-band device handles finger-level motion and haptic feedback that conventional glove controllers and vision-based tracking often miss.
Precisely captures human hand motion as raw motion data.
Turns natural hand movement into robot learning data without complex control steps.

Connects with development environments such as ROS2, Unity, Unreal, and Isaac Sim.
An open-band glove-type interaction device that precisely captures hand movement and provides per-finger haptic feedback.
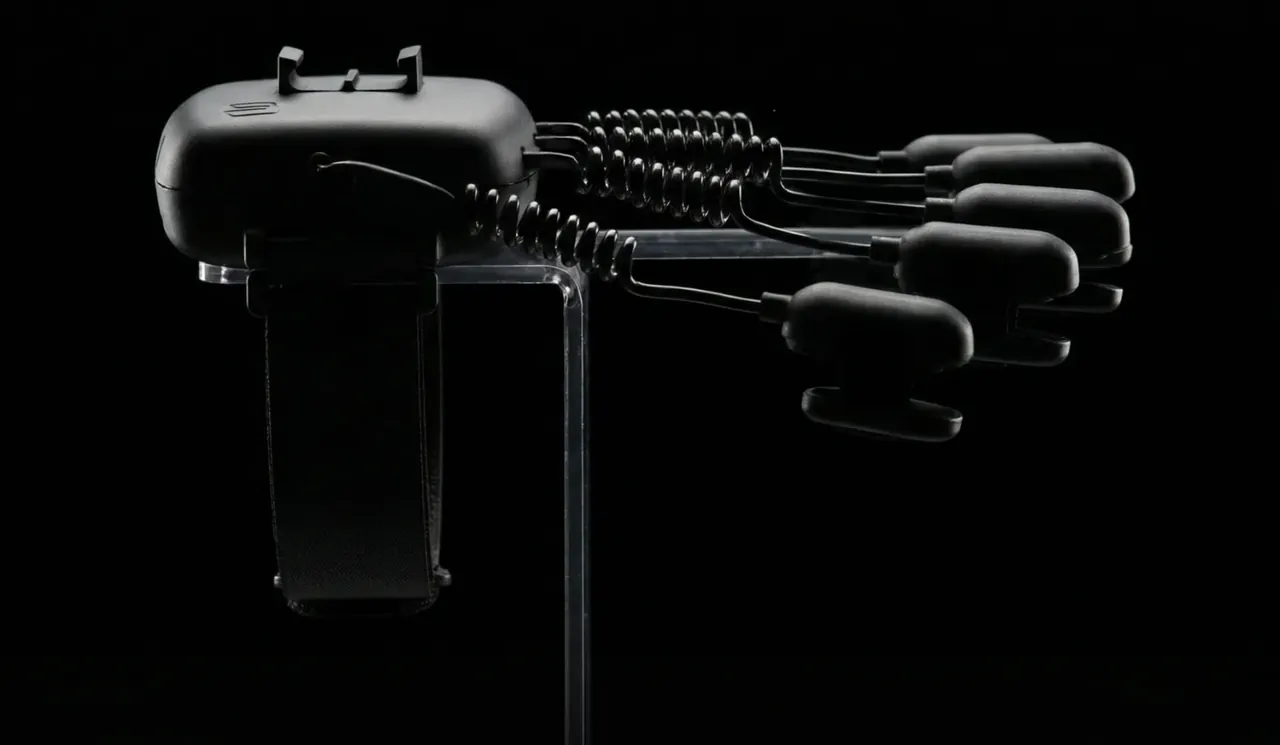

Open-band design
Fits various hand sizes
Motion tracking

Haptic feedback
Game engine integration

Development environment

Technical support

Demo scenes

Isaac Sim

ROS2
Unity

Unreal
Humanoid robot teaching and teleoperation

Industrial remote work

Medical simulation

XR-based virtual training
Air Glove Atlas turns human hand motion and manipulation into structured hand data, connecting it to robot learning and simulation pipelines.
The structure connects hand-motion capture, raw data collection, simulation transfer, and deployment to robot hands.
Capture

Captures finger bending, finger spread, and wrist motion.
Collect

Stores data in a form that can support robot teaching and learning.
Simulate
Connects the motion data to virtual environments such as ROS2 and Isaac Sim.
Deploy
Extends simulation and learning results into real robot-hand control.
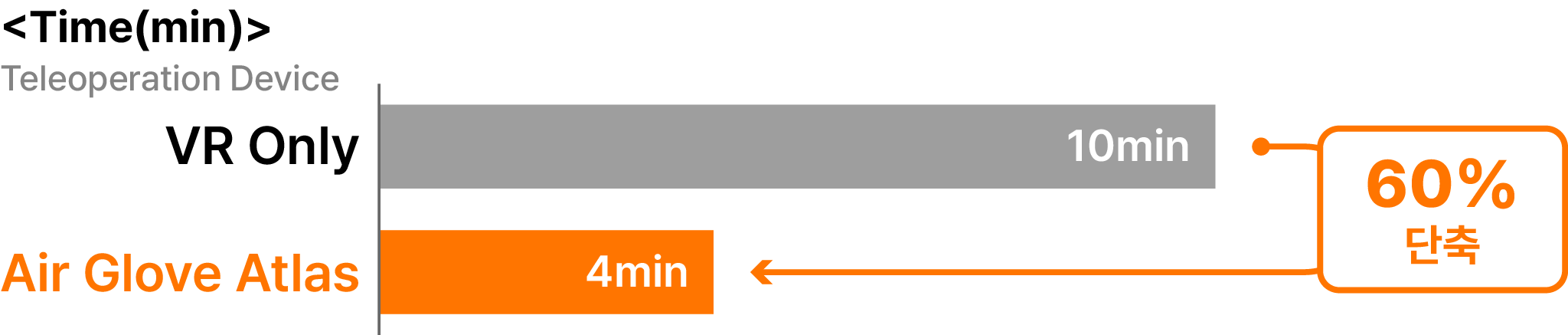
Air Glove Atlas enables faster and more accurate teleoperation than conventional VR-only methods.

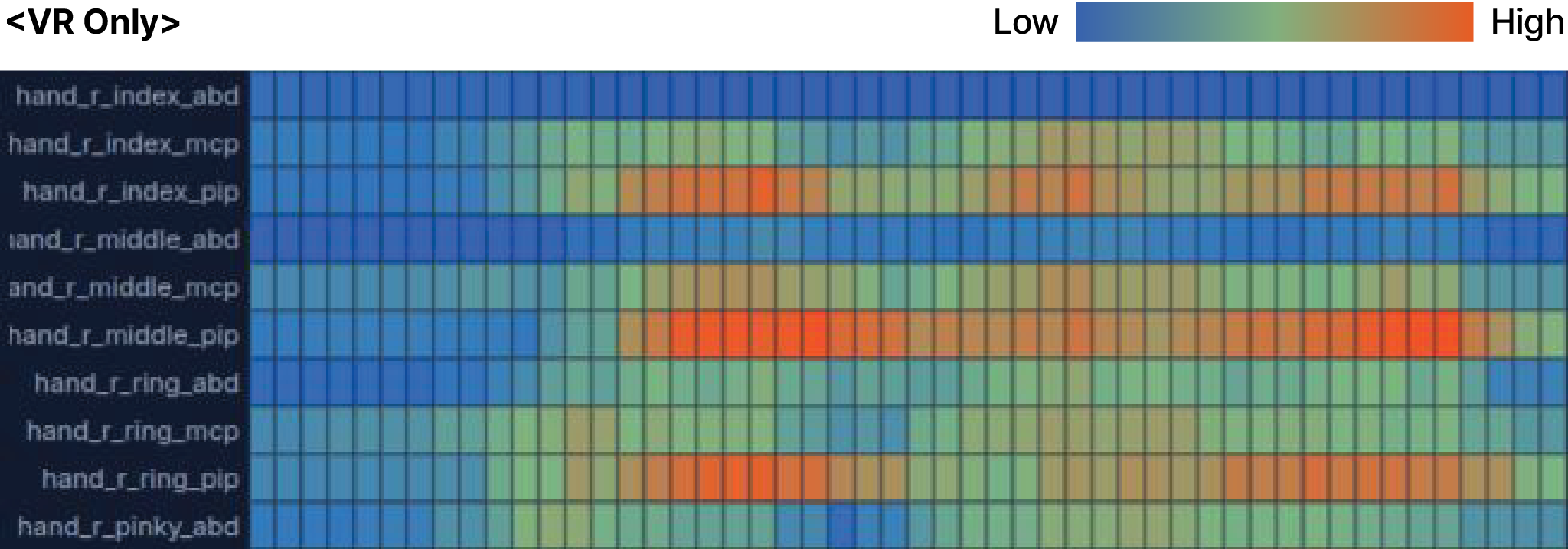
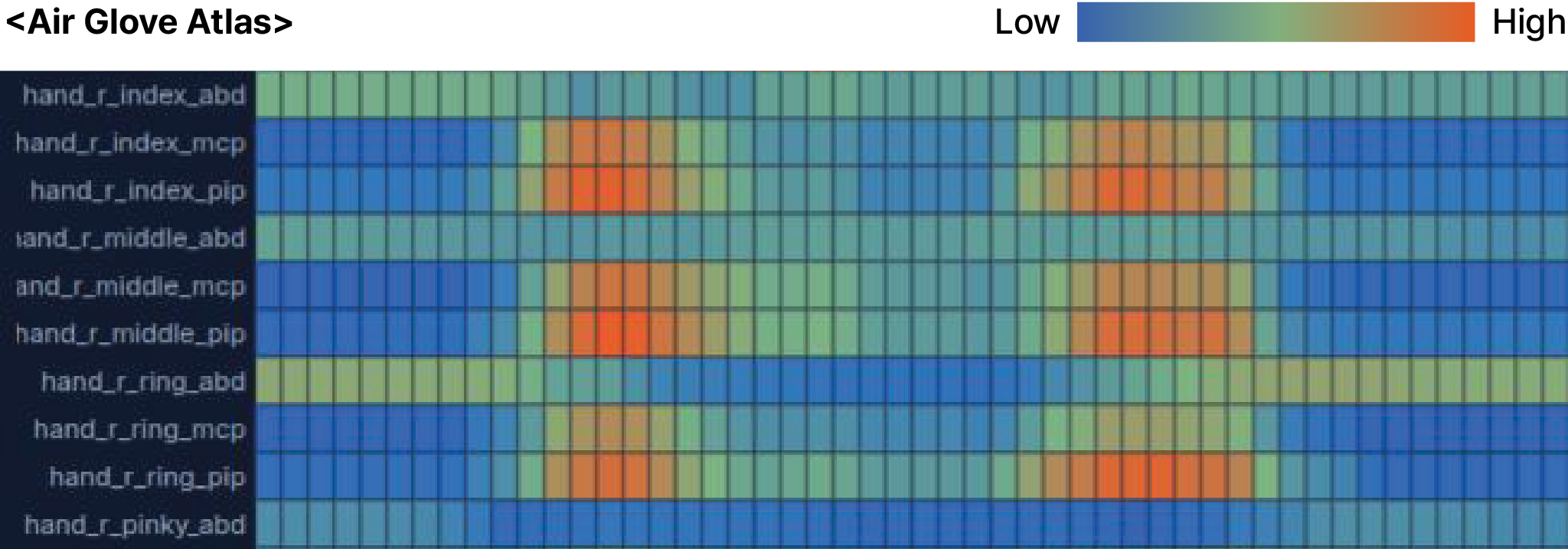
Data captured with Air Glove Atlas shows more stable action consistency than conventional VR-only methods.


Hand Pose
Grasping
MANO


Hand Pose
Grasping
MANO
Virtual Training
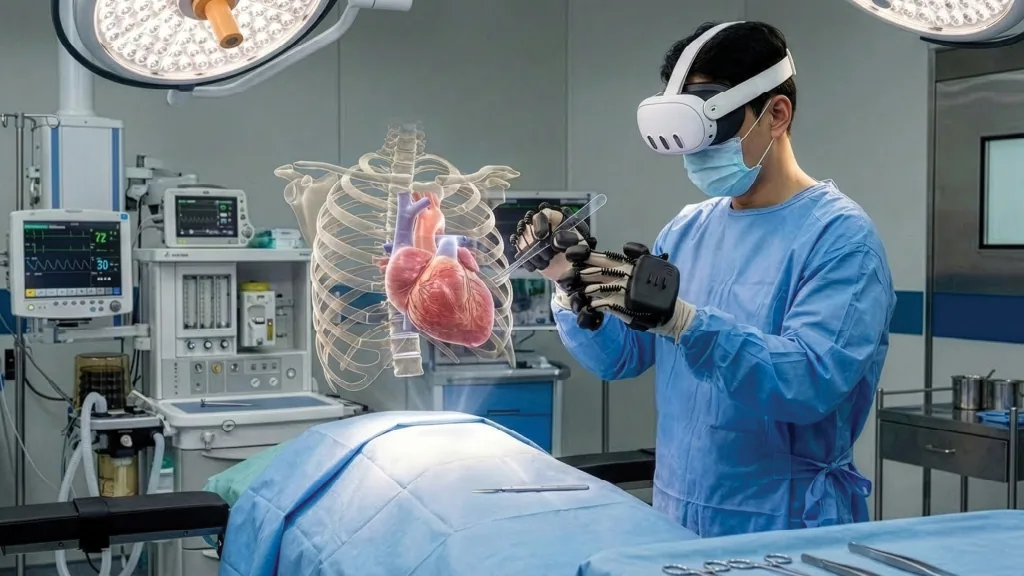
Extends medical procedures and rehabilitation training into hand-interactive XR experiences.

Turns equipment operation, safety training, and field procedures into repeatable training.

Converts repeat-practice tasks into immersive training environments.

Creates immersive practice content that learners can manipulate directly by hand.
“Hands-on training, real and measurable.”

Mobile catalog and product overview

Product motion and application demos

Purchase and adoption inquiry guide
We can review product and pipeline configurations for robot learning, XR training, medical rehabilitation, and related use cases.
Contact us